Colour Rough Textures Modelling
Jiri Filip
filipj&utia.cas.cz
presentation of the dissertation results, May 2005
.pdf version
|


 Example of BTF modelling using PLM-C reflectance model.
Example of BTF modelling using PLM-C reflectance model.
|
Abstract
Constantly increasing graphics hardware computational power finally enables
fast and realistic rendering of virtual reality models whose realisation was
until recently impossible. Such realistic models require, among others, natural
looking textures covering virtual objects of rendered scene.
Applications of these advanced texture models in virtual reality systems now
allow photorealistic material appearance approximation for
such complex tasks as visual safety simulations or interior design in
automotive/airspace industry or architecture.
For aim of such advanced applications a smooth textures lit by reflectance
models alternatively combined with bump-mapping are not able to offer correct
and realistic reproduction of material appearance. This is caused due to
inherited complexity of many materials whose rough structure produces such
visual effects as selfshadowing, masking, interreflection or subsurface
scattering.
The one way how capture these material's attributes is using much more complex
representation of a rough or 3D texture called Bidirectional Texture Function
(BTF). BTF is a six dimensional function depending on view and illumination
directions as well as on planar texture coordinates. This function is acquired
as several thousands of images during varying light and camera
positions. However, the huge size of measured BTF prevents it from using for any
fast application so introduction of some fast compression, modelling and
rendering method for BTF data is inevitable.
In this thesis we review BTF acquisition, modelling and rendering methods
published so far, survey problems concerning BTF mapping and rendering
implementation, surface height approximation and finally propose two novel BTF
modelling approaches realised in several BTF modelling methods.
The first proposed approach introduces probabilistic BTF model based on Markov
random field modelling of BTF subspaces. These subspaces are obtained using BTF
segmentation and the regular material pattern is introduced into the model by
means of surface height simulation.
The second one is based on polynomial extension of one-lobe Lafortune model
computed in every pixel of original BTF measurements. The model is further
extended by the parameters clustering to achieve higher compression ratio and
the BTF sample enlargement by means of an image tiling technique.
The first method offer slightly compromised visual quality for some materials
and enables compression ratio unbeatable by any other BTF compression or
modelling method while the second approach enable BTF modelling in excellent
quality with moderate compression ratio. Both mentioned models enable fast
hardware implementation and were tested on several distinct BTF materials,
theirproperties are discussed and obtained results are compared with the
original BTF measurements.
Although BTF modelling methods shows excellent performance there are still
several problems which limit their wide use in any system of virtual
reality. These limitations are within scope of extensive further research in
computer vision and computer graphics community.
|
Results
Reflectance BTF model
BTF data: Knitted wool - rectified to head on view position from elevation angle
60 degrees and azimutal angle 54 degrees. Animated size 128x128 pixels. Red dot
= light, blue dot = camera.
Standard one-lobe Lafortune model (left = original data, right = synthetised results).
Polynomial extension of one-lobe Lafortune model (left = original data, right = synthetised results).
Corresponding interactive demo is available for wool and leather materials.
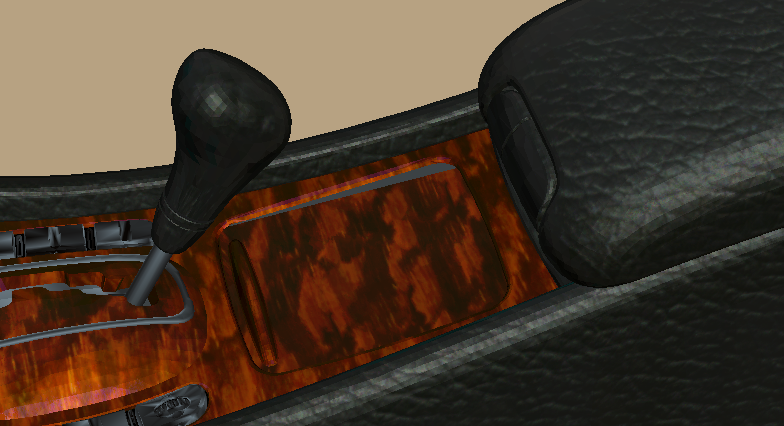
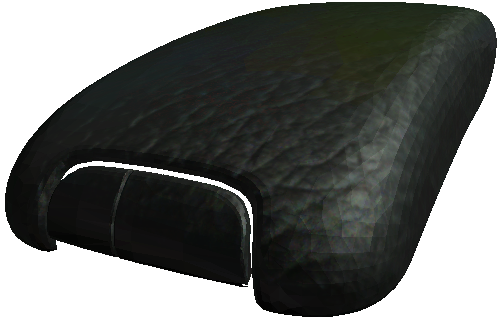
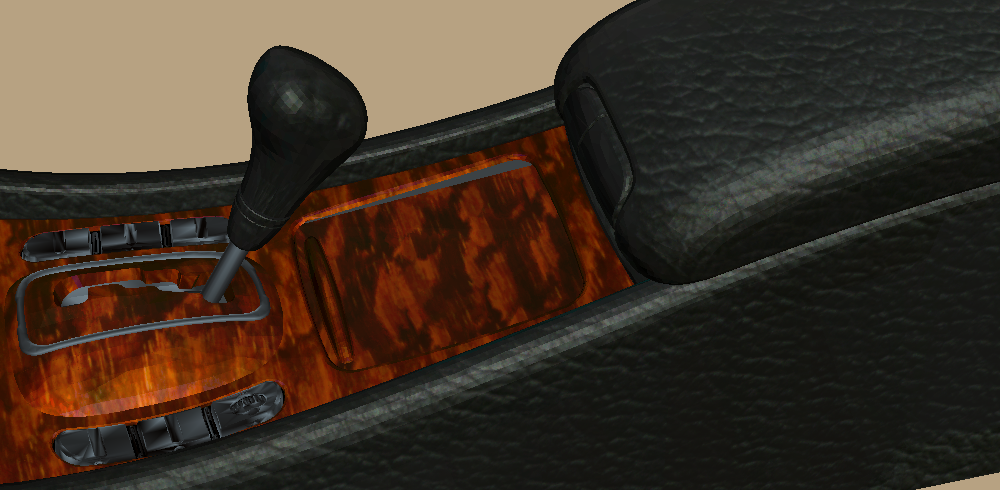
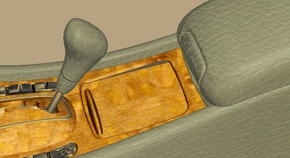
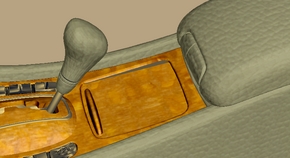
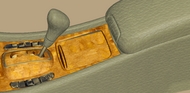
Original sampled BTF data mapped on a part of car gearbox

|
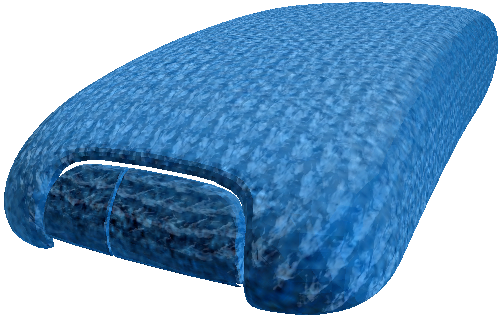
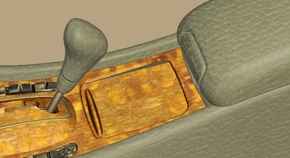
Result of one-lobe Lafortune reflectance model
|
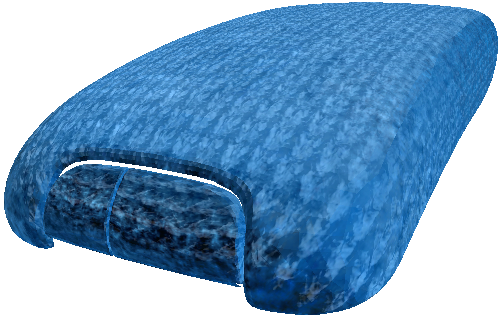
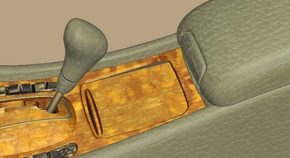
Result of the proposed polynomial extension of one-lobe Lafortune reflectance
model (PLM) (compression 1:12)

|
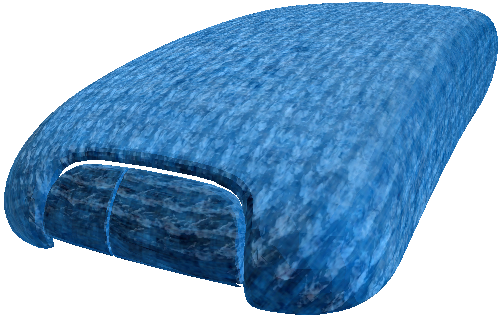
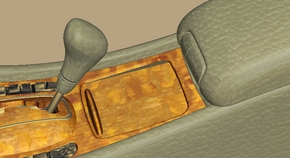
Result of the proposed clustered variant of PLM (PLM-C)
model (PLM) (compression 1:200)

|
PLM-C vith view angle interpolation only (3-times faster)

|
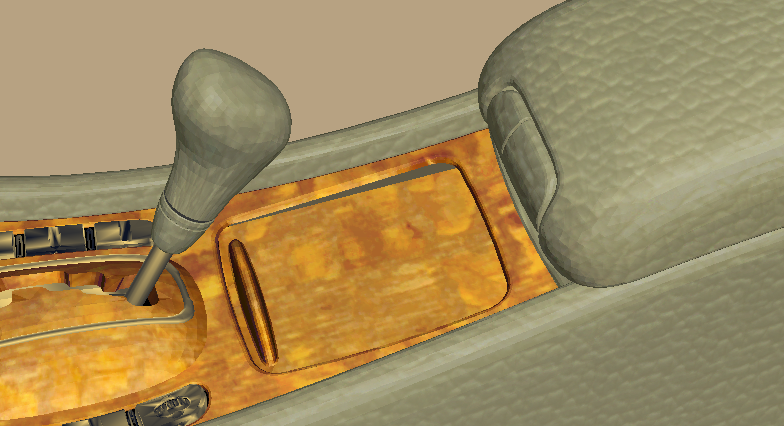
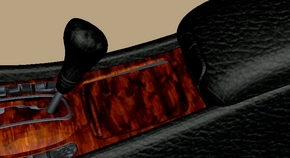
Part of Mercedes C-class interior covered with seven different BTFs using PLM model

 Corresponding video for the light version of interior (PLM-C) is here: xvid, msvid.
Corresponding video for the light version of interior (PLM-C) is here: xvid, msvid.
|
Probabilistic BTF model
Example of BTF enlargement for leather material using underlying GMRF
probabilistic model.
Corresponding .swf version
|
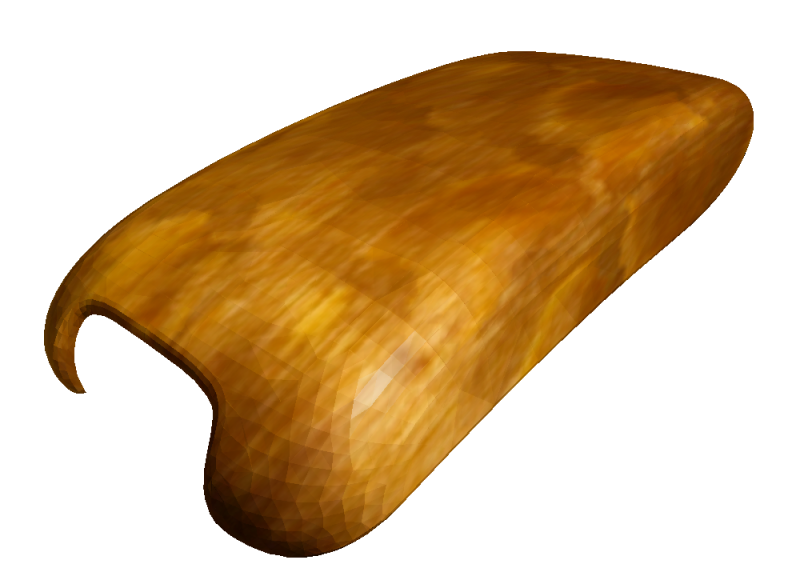
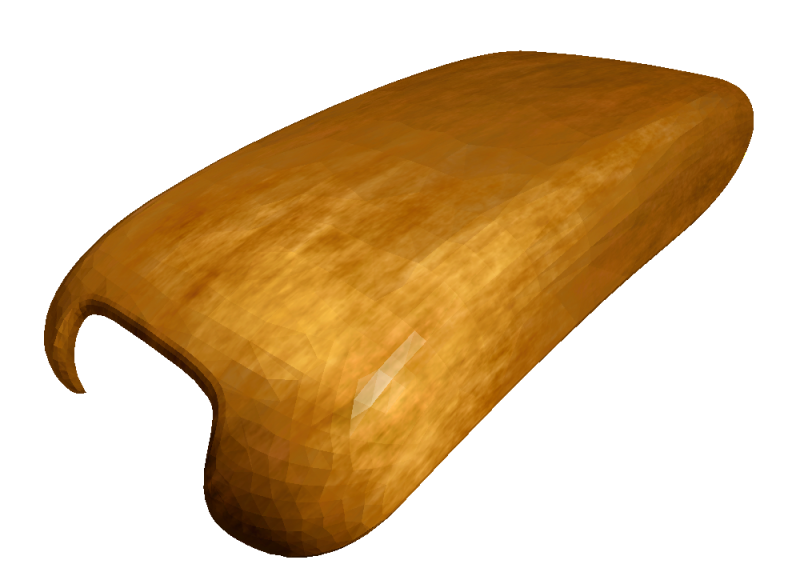
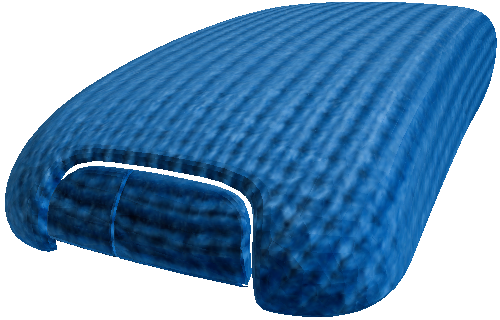
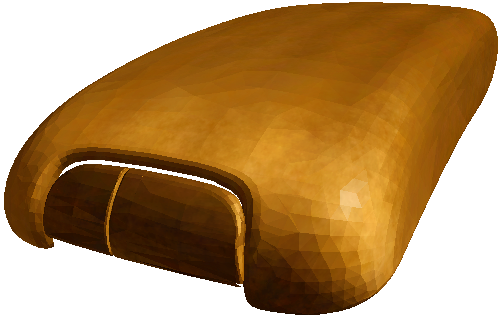
A car armrest covered with lacquered wood BTF by original sampled BTF
data (left) and 2D CAR BTF synthesis (right).

 Corresponding video in different codecs is here: xdiv1, divx, xdiv2.
Corresponding video in different codecs is here: xdiv1, divx, xdiv2.
|
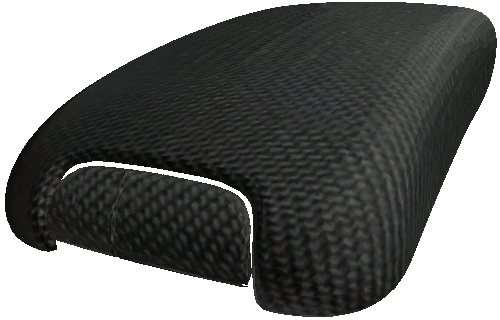
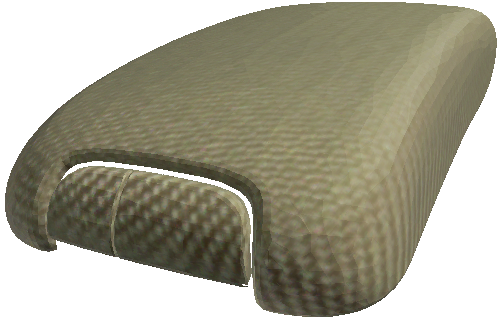
Comparison of original sampled BTF data with proposed probabilistic BTF models'
results mapped on a car armrest.
|
original BTF
|
GMRF
|
2D CAR
|
3D CAR
|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
|
Comparison of original sampled BTF data with proposed reflectance and
probabilistic BTF models results mapped on a car armrest. The probabilistic
models (GMRF, 2D CAR, 3D CAR) use additional bump-mapping according to sampled range-map.
|
original BTF
|
PLM-C
|
GMRF+range
|
2D CAR+range
|
3D CAR+range
|
|
|

|

|

|

|
|
|

|

|

|

|
|
|

|

|

|

|
|
|

|

|

|

|
|
|

|

|

|

|
|
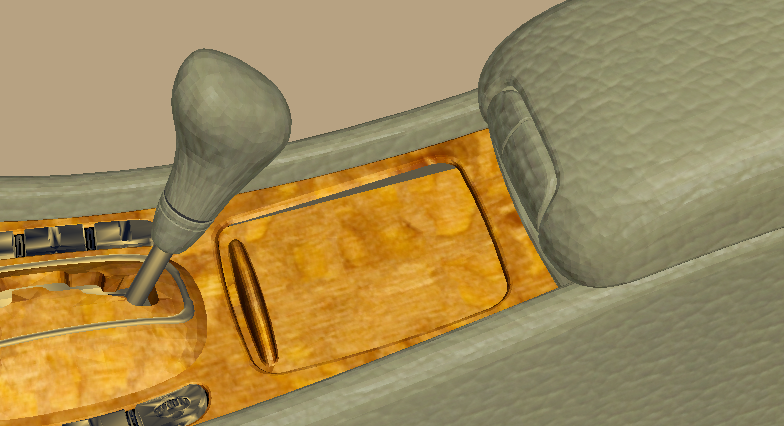
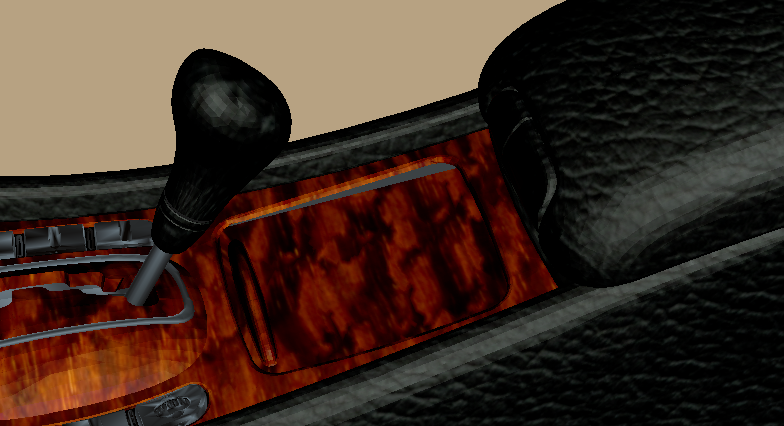
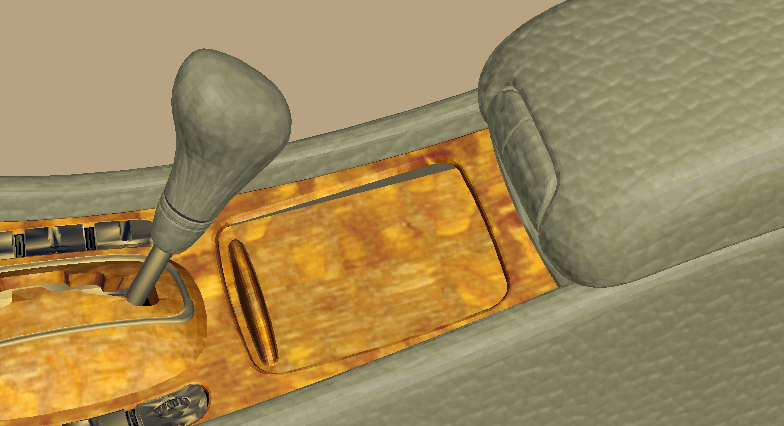
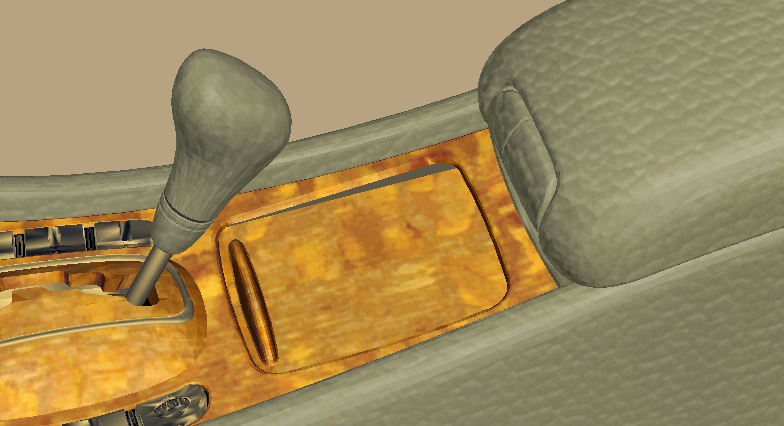
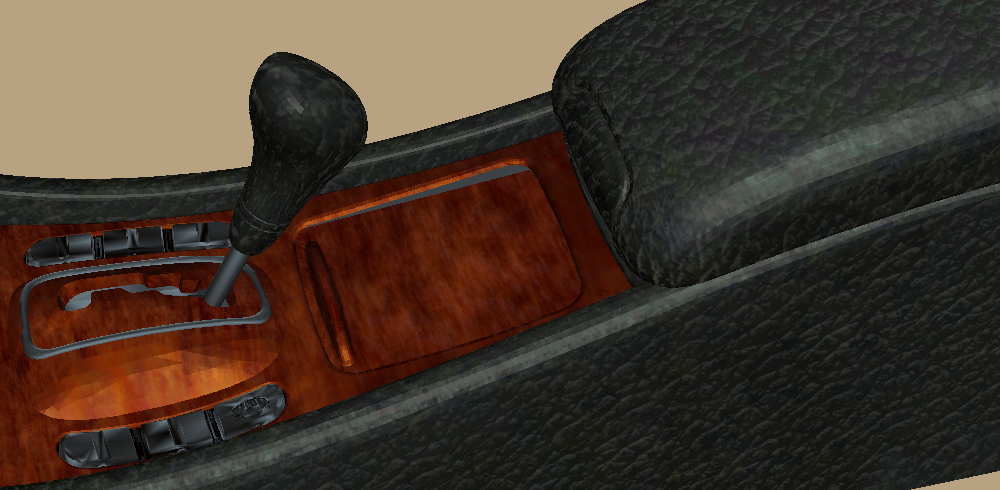
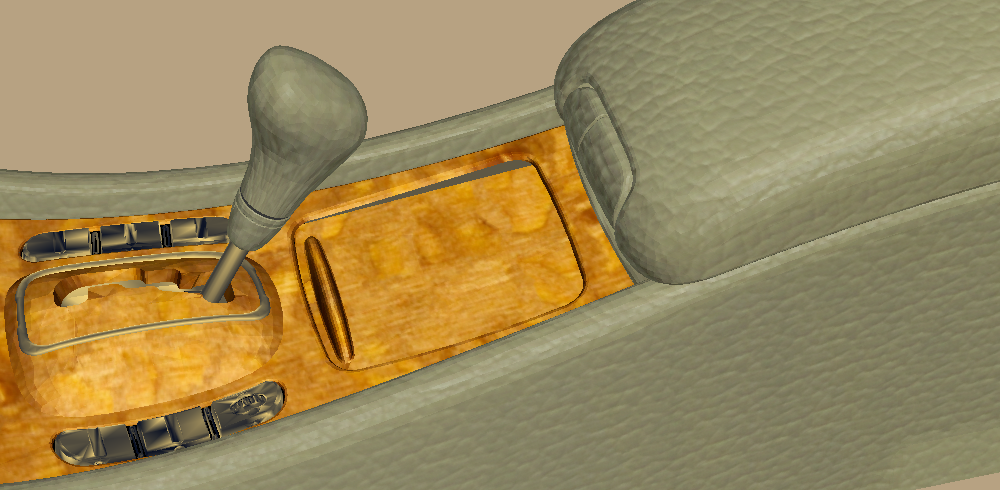
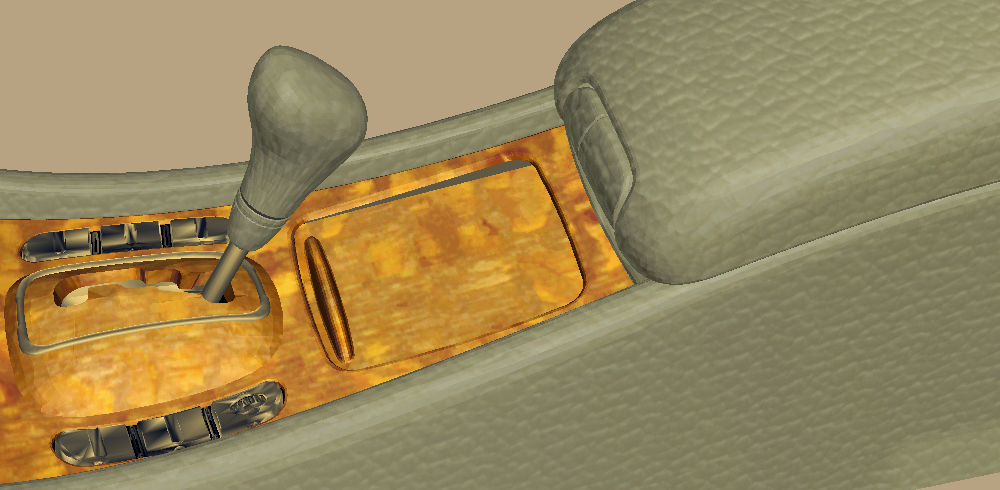
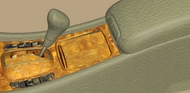
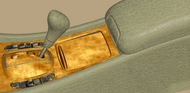
Comparison of the proposed BTF modelling approaches
Comparison of original BTF data with the both proposed modelling approaches on
a part of car gearbox for different leather and lacquered wood materials.
|
Original sampled BTF
|
PLM-C
|
2D CAR
|
 |
 |
 |
 |
 |
 |
|
|
|